Project
Control and Sensor Modules
Propulsion control and sensor acquisition modules for hybrid rocket systems.
The Problem
Hybrid rocket engines need valve timing in the low milliseconds and fast sensor reads to keep combustion stable. Off the shelf controllers are too big for a rocket airframe and don't have the safety interlocks we need for flight.
What I built
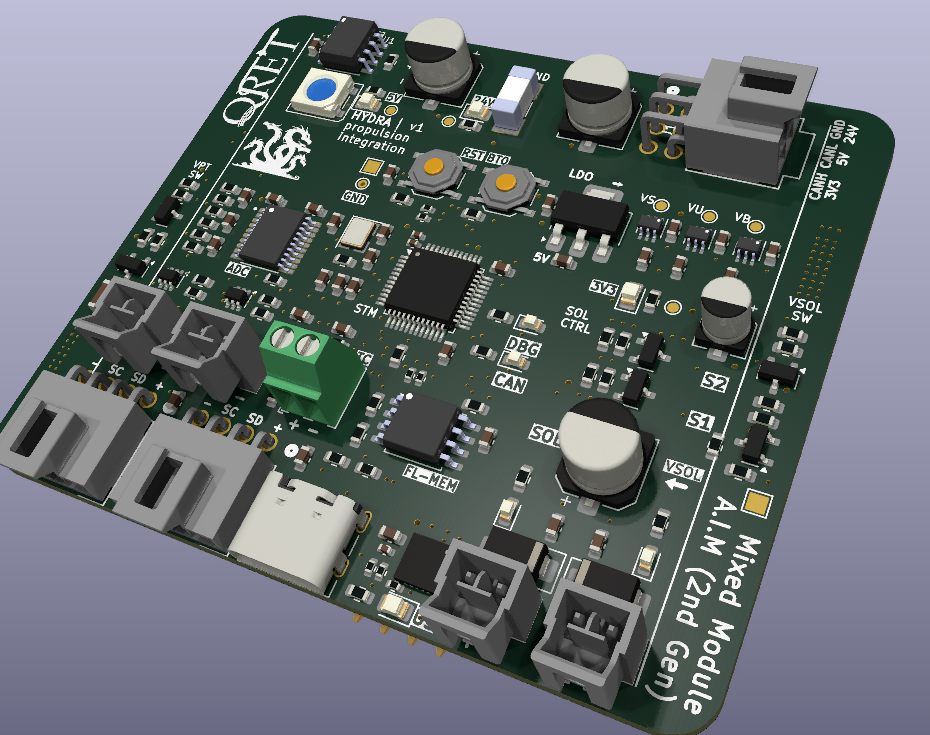
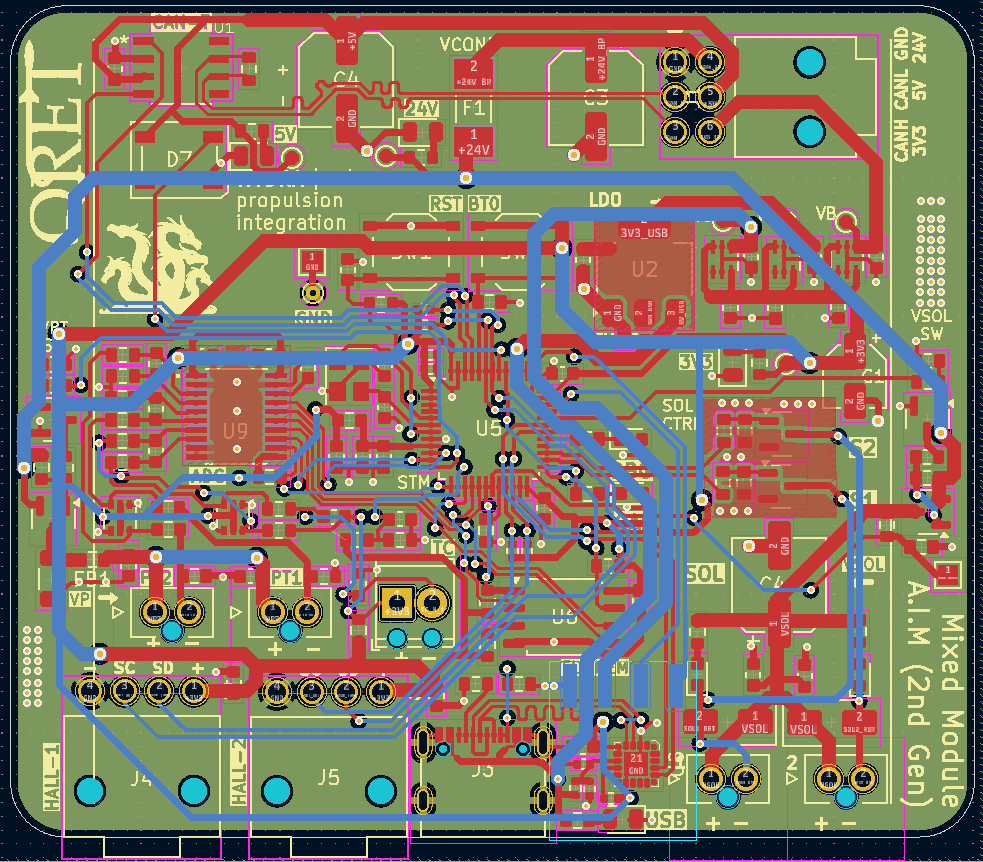
Two control and sensor boards that plug directly into the propulsion system. They do the same job — solenoid actuation with hardware fail-safes, pressure transducer reads, and CAN reporting — but differ by location and microcontroller. The upper module sits in the main avionics bay near the upper valve bay, runs an ESP32, communicates over WiFi for launch control, and uses our standard PCIe x1 edge connector. The lower module sits below the ox tank above the engine, runs an STM32, and connects to the upper board through a Molex Nano-Fit extension cable carrying 24V, 5V, 3.3V, GND, CANH, and CANL on just 6 pins.
A lot of the credit on these boards goes to Jeavan Sanchez. One thing I pushed hard on was using our EDA tool's schematic sharing feature so both boards pulled from the same source for shared circuitry — no copy paste drift between modules.
Highlights
- Upper module acts as leader, lower as follower — launch control only sees a single "rocket" while the upper handles CAN forwarding.
- Pressure transducer power switching to cut wattage during low power states.
- Clean board bring-up: probed all rails for continuity and resistance to ground, current-limited power supply, no critical issues on power-on.
- Verified PT reads, PT power switching, solenoid valves, and safe voltage switching for critical lower module valves.
Media
3D Viewer
Drag to rotate, scroll to zoom.